Zero-shot Minecraft Planning Agent: KB-Enhanced LLM-based PDDL Generation
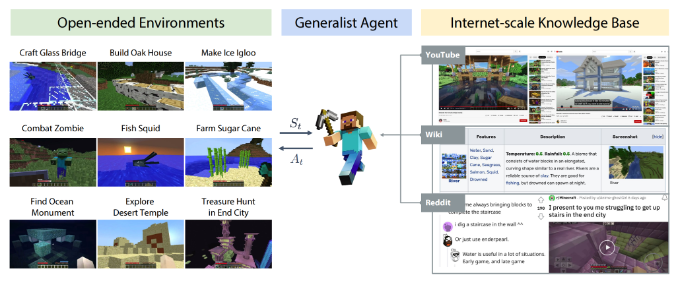
We tackle long-horizon planning in Minecraft by proposing KB-enhanced PDDL: retrieve prior knowledge from Wiki, construct or refine a PDDL domain, and reuse it for planning—reducing repeated LLM calls, improving success rate, and lowering token usage and execution time.
1. Background: Why long-horizon planning in Minecraft is hard
Minecraft tasks often require multi-step dependencies (e.g., crafting chains). The technology tree creates long plans with complex prerequisites, making zero-shot success difficult.

2. LLMs in task planning: Planner vs. World Model
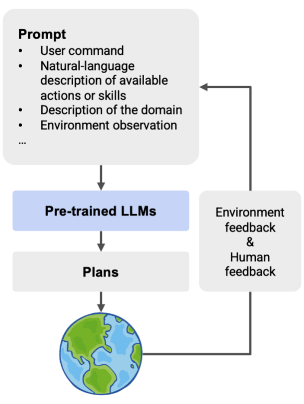
LLMs can be used in two roles:
- LLM as Planner: generate plans / high-level action sequences.
- LLM as World Model: model environment dynamics to support planning.
| LLM as Planner | LLM as World Model |
|---|---|
 |
 |
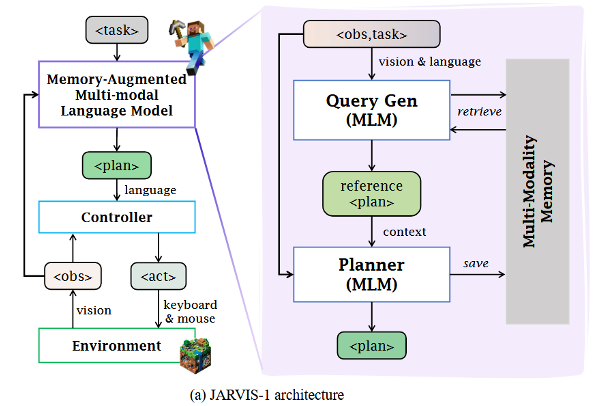
3. Jarvis-1 overview: Hierarchical planning with memory
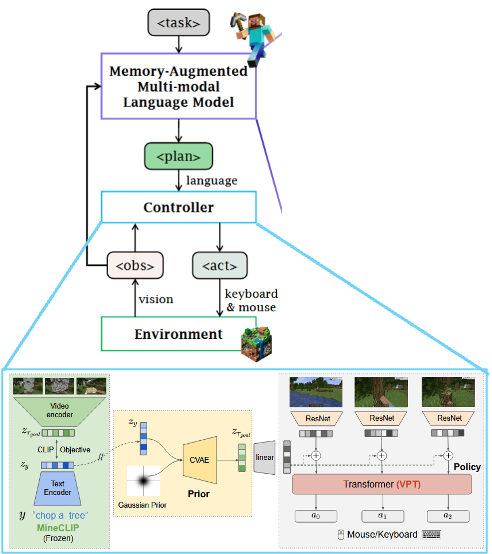
Jarvis-1 is a hierarchical approach where a memory-augmented MLLM retrieves reference trajectories and uses in-context learning to generate the next high-level action. The controller (e.g., Steve-1) maps high-level actions to real-time mouse/keyboard actions via a pretrained skill library.
4. Motivation: Rethinking Jarvis-1
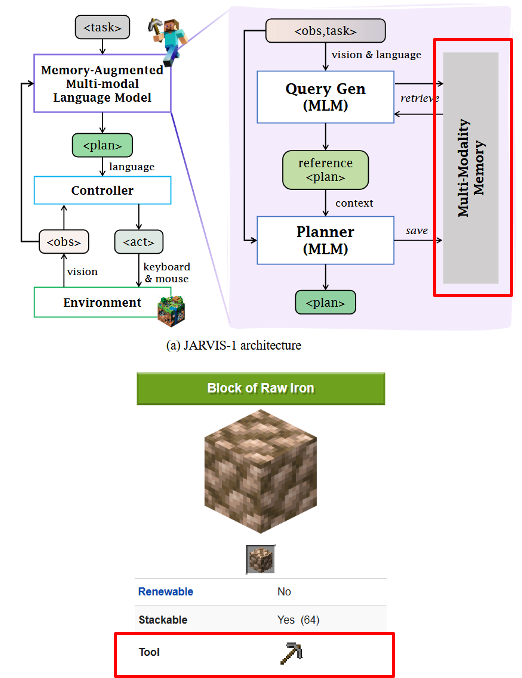
Q1: Where does prior knowledge come from?
Jarvis-1 relies heavily on a trajectory memory database (human-crafted / oracle / agent-generated). In a strict zero-shot setting, missing dependency knowledge can cause failures—for example, trying to dig raw iron without being equipped with the required tool. :contentReference[oaicite:5]{index=5}
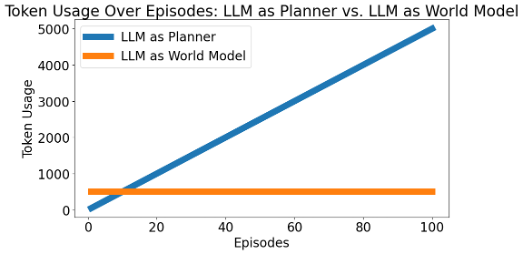
Q2: Is “LLM as planner” the best choice?
Querying an LLM for every action in every episode is expensive. If we run many episodes of the same task, LLM-as-policy scales like:
#episodes × #actions × tokens/action
Whereas PDDL planning can reuse a domain and only pay the cost of a small number of domain improvements:
1 × (#PDDL improvements):contentReference[oaicite:6]{index=6}
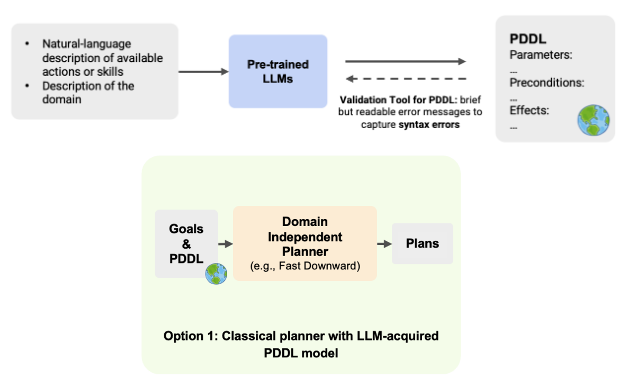
5. Method: KB-enhanced PDDL Generation
We answer the two questions above as follows:
- Prior knowledge can be retrieved from Wiki.
- This knowledge can be converted into a reusable PDDL domain file, so we can plan without querying the LLM at every step.
- The resulting planned actions are executed by the controller (e.g., Steve-1).
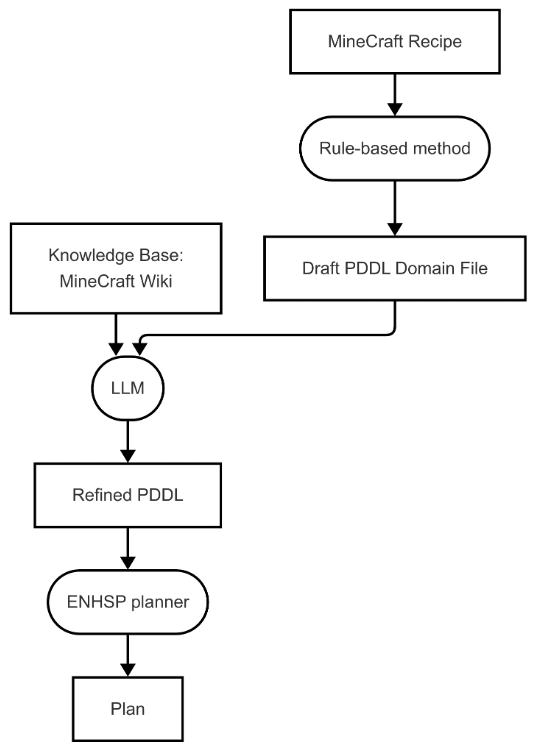
5.1 Pipeline (high-level)
- Retrieve relevant crafting/dependency knowledge from Wiki (KB).
- Construct/Refine a PDDL domain (actions, preconditions, effects).
- Plan with a PDDL planner to obtain a high-level action sequence.
- Execute planned actions via the controller in the Minecraft environment.
6. Experiments
6.1 Task settings
We evaluate on increasingly challenging tasks:
- Get crafting table
- Get wooden pickaxe
- Get stone pickaxe
- Get iron pickaxe (most challenging) :contentReference[oaicite:9]{index=9}

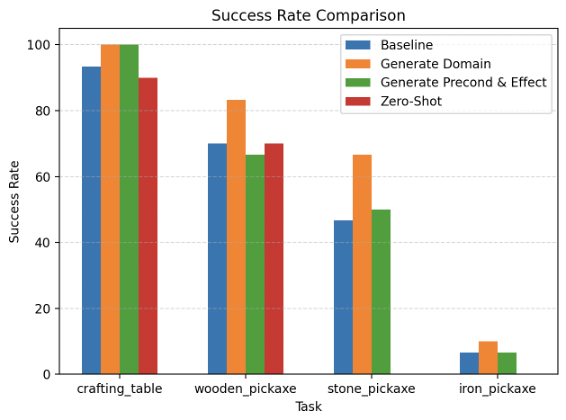
6.2 Method settings (baselines)
We compare against:
- Baseline: Jarvis without memory
- Generate Domain: LLM generates
domain.pddl - Generate Precond & Effect: LLM generates domain preconditions & effects
- Zero-shot: Jarvis without memory and without dependency knowledge
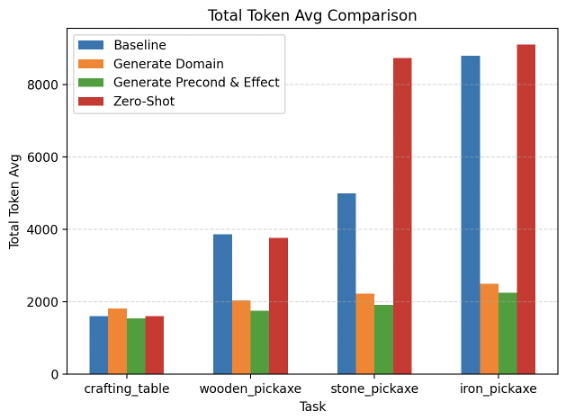
6.3 Metrics
We report:
- Success rate
- Token usage (including plan token vs skill token breakdown)
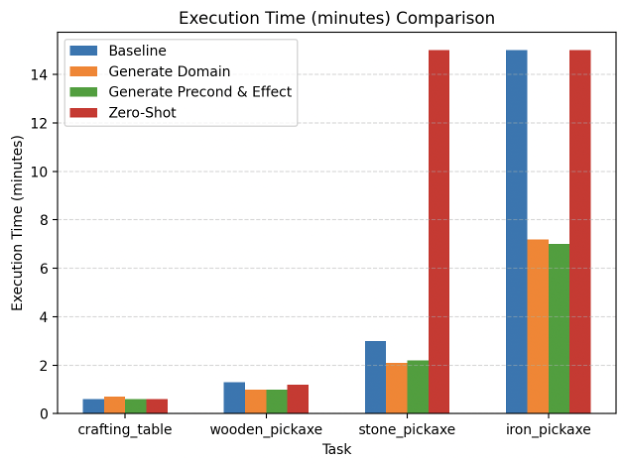
- Execution time
7. Results & Discussion
From the presentation results:
- Higher success rate with KB-enhanced PDDL
- Lower token usage, especially by reducing repeated planning-time LLM queries
- Faster execution time
- More controllable and interpretable planning, reducing hallucination or erroneous actions
8. Demo: In-game execution
We include an in-game execution demonstration comparing:
- Jarvis-1 using LLM
getskills - Jarvis-1 using KB-enhanced PDDL
| Baseline | KB-enhanced PDDL |
|---|---|
 |
 |
9. Advantages
Our approach:
- Uses fewer tokens while achieving higher success rate
- Reduces hallucination / erroneous actions
- Speeds up execution time
- Makes planning more controllable and interpretable
10. Limitations & Future Work
10.1 Quantity-insensitive planning
A plan can be procedurally correct but still fail due to insufficient item quantities. A possible solution is quantity-aware planning.
10.2 Text-only action decisions (no visual cues) + luck-driven mining
Current decisions rely on text-only signals; mining can be luck-driven, so success can depend on chance. A future direction is action decisions based on both text and visual information. :contentReference[oaicite:16]{index=16}
References
- Fan, Linxi, et al. MineDojo: Building open-ended embodied agents with internet-scale knowledge. NeurIPS 2022. :contentReference[oaicite:17]{index=17}
- Wang, Zihao, et al. Jarvis-1: Open-world multi-task agents with memory-augmented multimodal language models. TPAMI 2024. :contentReference[oaicite:18]{index=18}
- Guan, Lin, et al. Leveraging pre-trained large language models to construct and utilize world models for model-based task planning. NeurIPS 2023. :contentReference[oaicite:19]{index=19}
- Lifshitz, S., et al. Steve-1: A generative model for text-to-behavior in Minecraft. NeurIPS 2023. :contentReference[oaicite:20]{index=20}